
MoveIt Motion Planning: Collision-Free Path Generation for Robot Manipulators
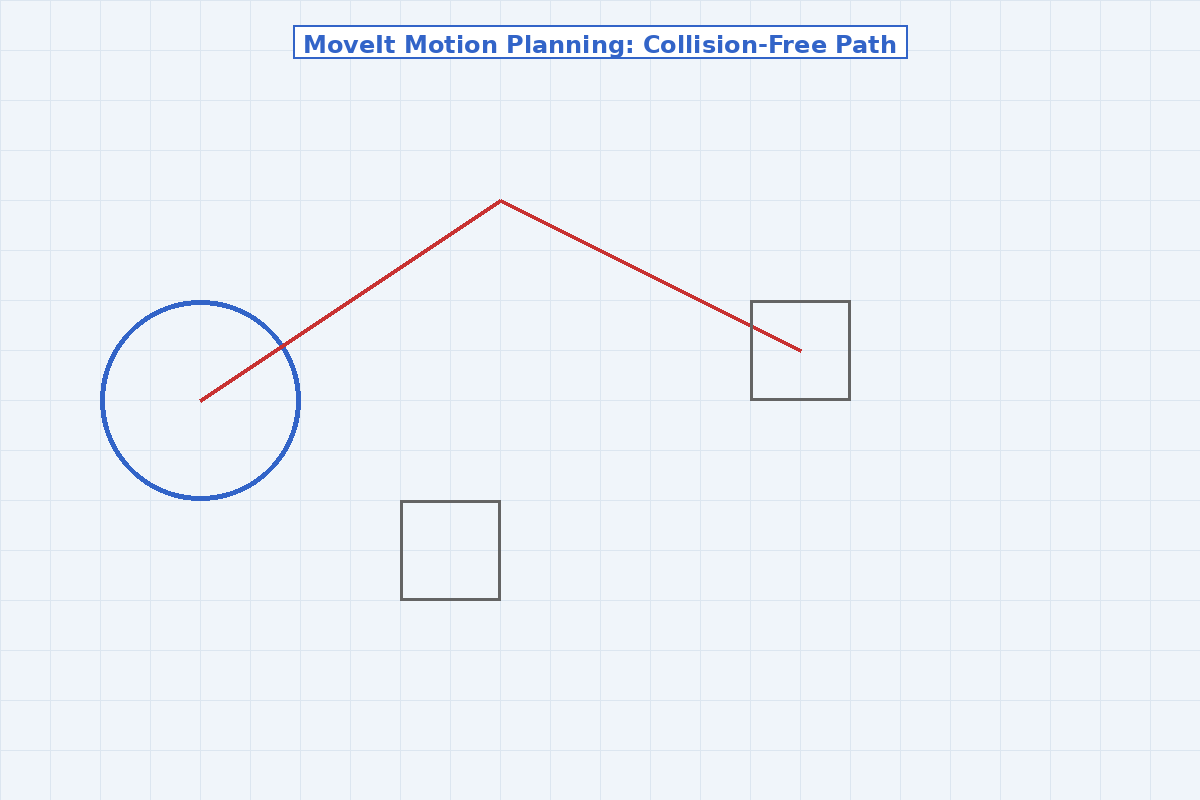
Motion planning remains one of the most computationally intensive challenges in robotics, requiring real-time calculation of collision-free trajectories through complex configuration spaces. MoveIt, the de facto motion planning framework for ROS-based manipulators, provides a sophisticated suite of algorithms and tools that enable robots to navigate safely from start to goal configurations while respecting kinematic constraints and avoiding obstacles.
Core Architecture and Planning Algorithms
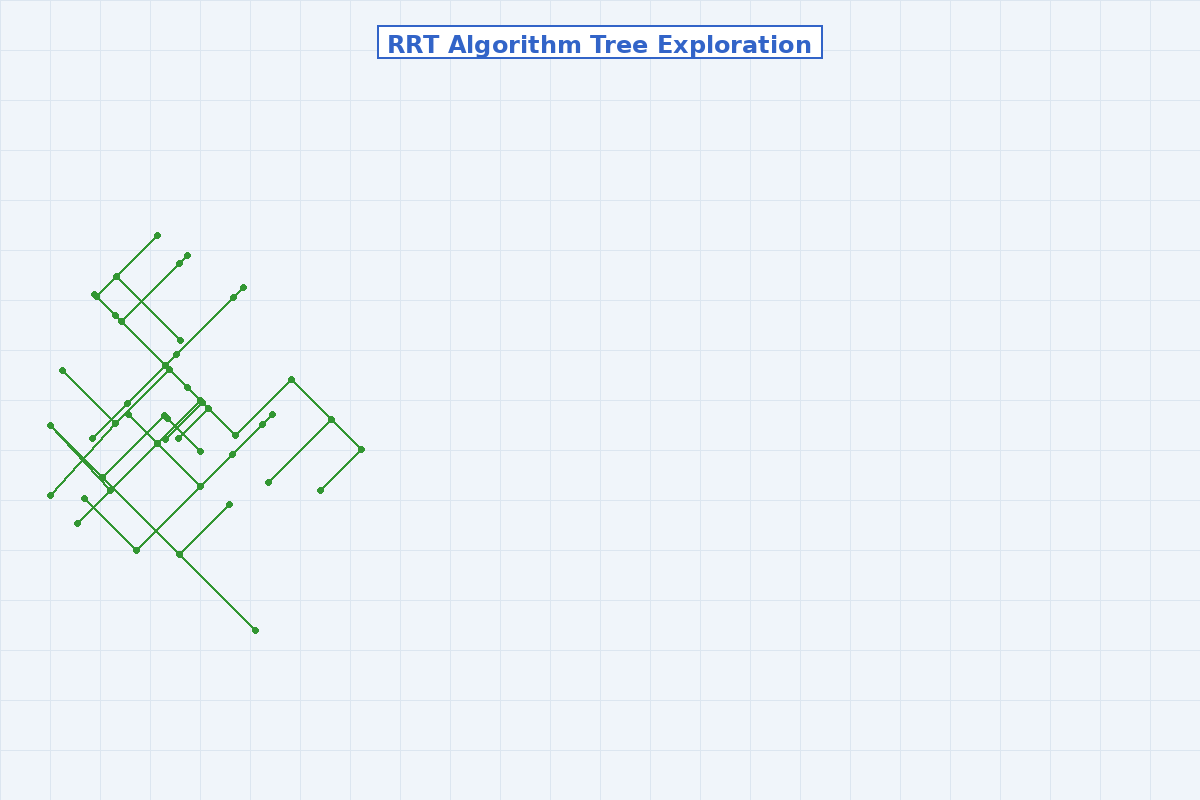
MoveIt integrates multiple state-of-the-art motion planning libraries through a unified interface, with the Open Motion Planning Library (OMPL) serving as its primary backend. The framework supports sampling-based planners including RRT (Rapidly-exploring Random Trees), RRT-Connect, PRM (Probabilistic Roadmap), and KPIECE, each optimized for different planning scenarios. Engineers can select planners based on specific requirements: RRT-Connect excels in simple environments with moderate dimensionality, while PRM performs better when multiple queries are needed in static environments.

The planning pipeline operates through several distinct phases. First, the scene representation module constructs an occupancy map from sensor data, typically point clouds or depth images. The collision checking system then validates potential configurations using geometric primitives or mesh-based representations. Finally, trajectory optimization smooths the initial path to reduce execution time and improve motion quality through techniques like time parameterization and shortcut smoothing.
Inverse Kinematics and Constraint Handling
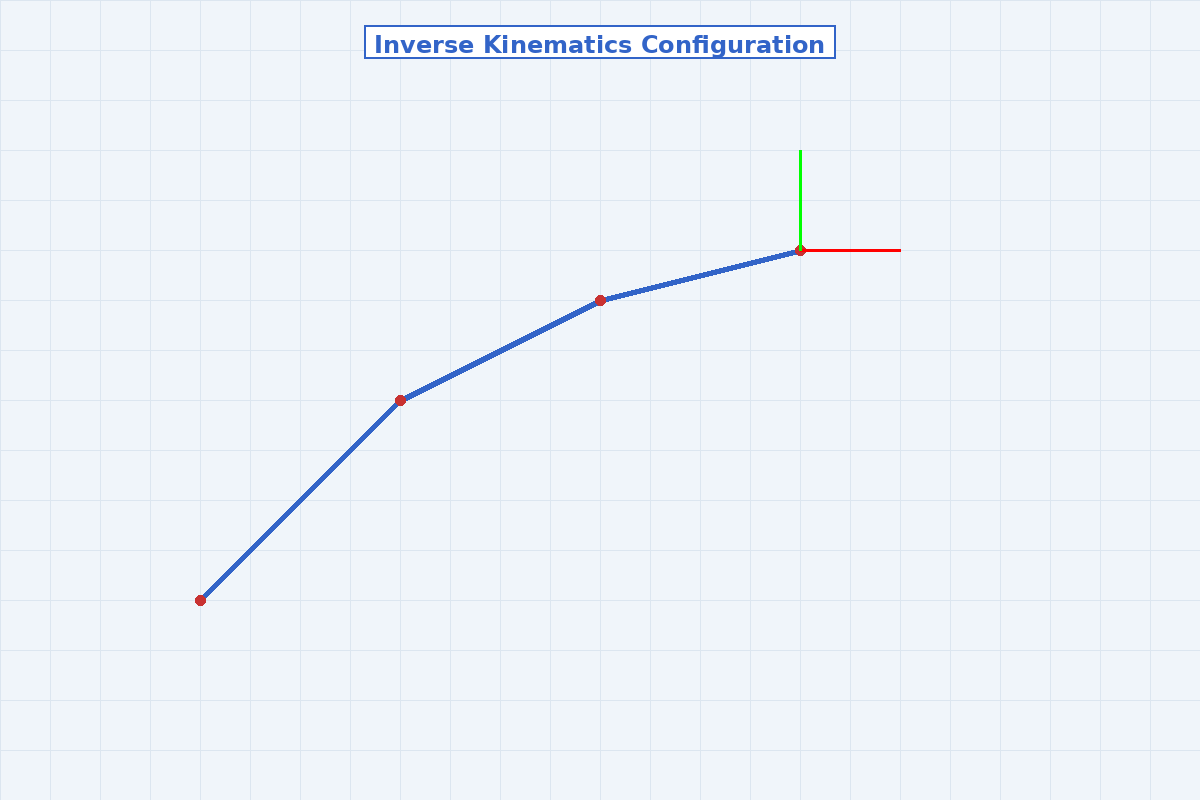
A critical component of MoveIt's functionality is its pluggable inverse kinematics (IK) solver architecture. While the default KDL solver provides adequate performance for many applications, specialized solvers like TRAC-IK and IKFast offer significant improvements. TRAC-IK combines global and local optimization to achieve higher success rates and faster solve times, particularly for redundant manipulators. IKFast generates analytical solutions for specific robot geometries, providing deterministic performance with sub-millisecond solve times.
MoveIt also supports complex motion constraints through its constraint-aware planning capabilities. Engineers can specify Cartesian path constraints, orientation constraints, joint limits, and custom constraints through the planning request interface. The framework handles these constraints during planning by rejecting invalid states and biasing sampling toward feasible regions, though this typically increases planning time proportional to constraint complexity.
Integration with Perception and Control
Modern robotic applications require tight integration between perception, planning, and control systems. MoveIt's Octomap integration enables dynamic obstacle avoidance by continuously updating the planning scene from 3D sensor data. The framework processes point clouds at rates sufficient for semi-dynamic environments, though highly dynamic scenarios may require specialized reactive planning approaches.
The execution pipeline connects seamlessly with robot controllers through the FollowJointTrajectory action interface. MoveIt generates trajectories with specified velocity and acceleration limits, which the controller tracks using PID or more advanced control schemes. For applications requiring force control or compliant motion, MoveIt can be extended with admittance control frameworks or integrated with specialized controllers.
Performance Optimization and Best Practices
Achieving real-time performance with MoveIt requires careful configuration and optimization. Planning time scales exponentially with degrees of freedom, making it essential to minimize the planning group size when possible. For complex robots, decomposing the planning problem into sequential subproblems for different kinematic chains can dramatically reduce computation time.
Collision checking represents the primary computational bottleneck in most planning scenarios. Engineers should use simplified collision geometries where possible, replacing detailed meshes with primitive shapes or convex hulls. The Allowed Collision Matrix (ACM) should be configured to disable checks between links that can never collide, reducing unnecessary geometric queries.
Pre-computing and caching IK solutions for common workspace regions can eliminate solve time during execution. For repetitive tasks, experience-based planning using Lightning framework stores and retrieves previously successful paths, reducing planning time by orders of magnitude for similar queries.
Advanced Features and Extensions
MoveIt's modular architecture supports numerous advanced capabilities beyond basic motion planning. The pick-and-place pipeline provides high-level interfaces for manipulation tasks, automatically handling grasp planning, approach trajectories, and place operations. Multi-arm coordination enables synchronized motion of multiple manipulators with collision avoidance between arms.
The framework also supports planning in task space through Cartesian trajectory generation, useful for applications requiring precise end-effector paths like welding or painting. While Cartesian planning is more restrictive than joint-space planning, it provides intuitive control for tasks where the path shape matters.
For research and development, MoveIt's plugin architecture allows integration of custom planners, IK solvers, and constraint samplers. The framework's extensive API and active community make it an ideal platform for prototyping novel motion planning algorithms before deployment in production systems.
Conclusion
MoveIt has established itself as the industry standard for robot motion planning in ROS ecosystems, offering a comprehensive solution that balances flexibility, performance, and ease of use. Its extensive algorithm library, robust collision checking, and seamless integration with perception and control systems make it suitable for applications ranging from industrial automation to research platforms. Understanding its architecture and optimization strategies enables engineers to leverage its full capabilities for developing sophisticated robotic manipulation systems.
For detailed documentation and tutorials, visit the official MoveIt documentation and explore the MoveIt GitHub repository for the latest developments in MoveIt 2 for ROS 2.