
NVIDIA Isaac Sim: GPU-Accelerated Robot Simulation with Synthetic Data Generation
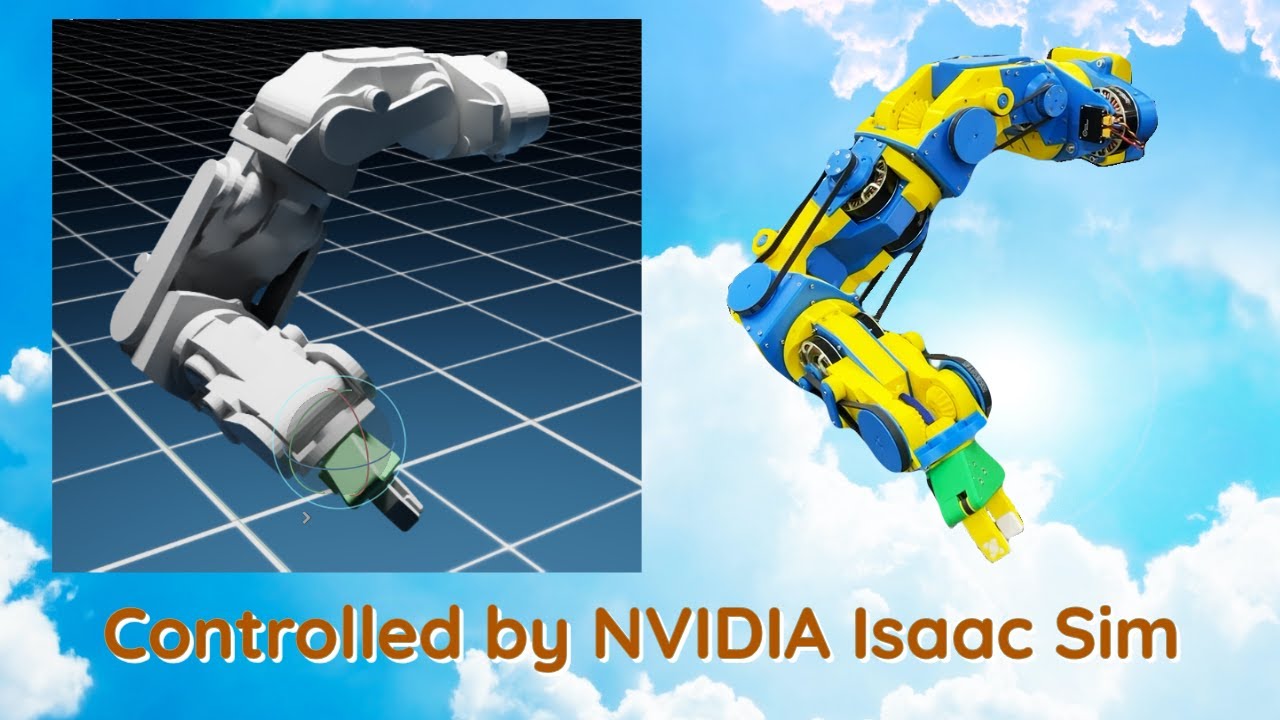
NVIDIA Isaac Sim is a high-fidelity, GPU-accelerated robotics simulation platform built on the Omniverse USD (Universal Scene Description) framework. Unlike traditional CPU-bound simulators, Isaac Sim leverages RTX ray tracing and PhysX 5 to deliver photorealistic rendering and accurate rigid-body dynamics simultaneously — making it the go-to platform for teams developing perception-heavy autonomous systems that must bridge the sim-to-real gap.
Why Isaac Sim Stands Apart
Most open-source simulators trade visual fidelity for speed. Isaac Sim breaks this compromise by running physics, rendering, and sensor simulation on the GPU in parallel. A single workstation with an RTX 4090 can sustain 60+ FPS while simultaneously computing:
- LiDAR point clouds with configurable beam patterns and range noise
- RGB-D camera streams with physically based materials and global illumination
- IMU and contact sensor outputs synchronized to the physics timestep
This matters enormously for training and validating deep-learning perception pipelines, where the realism of synthetic training data directly determines downstream model accuracy.

Core Architecture: Omniverse USD and Extensions
Isaac Sim is structured as a set of Omniverse Extensions layered on top of the USD scene graph. Every robot, sensor, and environment asset is a USD prim, which means:
- Non-destructive composition — robot variants, sensor configurations, and environment layouts can be layered as USD overrides without modifying base assets.
- Live sync — multiple engineers can collaborate on the same simulation scene in real time via Omniverse Nucleus.
- Python scripting — the
omni.isaac.coreAPI exposes a clean Python interface for programmatic scene construction, task definition, and data collection.
A minimal scene setup looks like this:
from omni.isaac.core import World
from omni.isaac.core.robots import Robot
world = World(stage_units_in_meters=1.0)
world.scene.add_default_ground_plane()
robot = world.scene.add(
Robot(prim_path="/World/Franka", name="franka",
usd_path="omniverse://localhost/NVIDIA/Assets/Isaac/4.2/Isaac/Robots/Franka/franka.usd")
)
world.reset()
for _ in range(1000):
world.step(render=True)Synthetic Data Generation with Replicator
One of Isaac Sim's most powerful — and underutilized — features is NVIDIA Replicator, the built-in synthetic data generation (SDG) framework. Replicator allows engineers to:
- Randomize lighting conditions, material textures, object poses, and camera viewpoints programmatically
- Annotate ground-truth bounding boxes, segmentation masks, depth maps, and keypoints automatically
- Export datasets in KITTI, COCO, or custom formats for direct ingestion into training pipelines
A typical Replicator workflow for a bin-picking dataset:
import omni.replicator.core as rep
with rep.new_layer():
camera = rep.create.camera(position=(0, 0, 1.5), look_at=(0, 0, 0))
with rep.trigger.on_frame(num_frames=5000):
with rep.create.group([object_prim]):
rep.modify.pose(
position=rep.distribution.uniform((-0.3, -0.3, 0.05), (0.3, 0.3, 0.15)),
rotation=rep.distribution.uniform((0, 0, 0), (360, 360, 360))
)
rep.modify.light_color(rep.distribution.uniform((0.5, 0.5, 0.5), (1.0, 1.0, 1.0)))
rep.orchestrator.run()This generates 5,000 annotated frames with randomized object poses and lighting — a dataset that would take weeks to collect physically.
ROS 2 Integration and the Action Graph
Isaac Sim ships with a native ROS 2 bridge that publishes sensor data and subscribes to control commands without requiring any middleware configuration. The bridge is configured through the Action Graph — a node-based visual scripting system that wires simulation events to ROS 2 topics.
Key nodes include:
| Node | Function |
|---|---|
ROS2PublishImage |
Publishes camera frames to /camera/image_raw |
ROS2PublishLaserScan |
Publishes 2D LiDAR scans |
ROS2PublishJointState |
Publishes robot joint positions and velocities |
ROS2SubscribeJointState |
Receives joint commands from a controller |
This allows teams to run their full ROS 2 navigation or manipulation stack — Nav2, MoveIt 2, or custom nodes — against the Isaac Sim environment with zero code changes.
Sim-to-Real Transfer: Best Practices
The sim-to-real gap remains the central challenge in robotics simulation. Isaac Sim addresses it through several mechanisms, but engineers must apply them deliberately:
1. Domain Randomization at the Physics Level
Beyond visual randomization, vary friction coefficients, object masses, and joint damping within physically plausible ranges. This forces learned policies to be robust to model uncertainty rather than overfitting to nominal parameters.
2. Articulation Drive Tuning
Isaac Sim's ArticulationController uses position/velocity/effort drive modes. Match the drive gains to your real hardware's PD controller parameters — mismatched stiffness is a leading cause of policy transfer failure.
3. Contact-Rich Task Validation
For manipulation tasks involving contact (insertion, assembly), enable PhysX GPU contact reporting and validate that contact forces match real-world measurements before training. Isaac Sim's contact sensor API provides per-body force/torque data at simulation frequency.
4. Headless Batch Simulation
For RL training, disable rendering entirely and run multiple parallel environments using Isaac Lab (the successor to OmniIsaacGymEnvs). A single A100 GPU can run 4,096 parallel Franka arm environments at thousands of steps per second.
Performance Benchmarks and Hardware Requirements
| Configuration | Environments | Steps/sec |
|---|---|---|
| RTX 4090, rendering ON | 1 | ~120 |
| RTX 4090, headless | 64 | ~8,000 |
| A100 80GB, headless (Isaac Lab) | 4,096 | ~250,000 |
Minimum recommended hardware for development: RTX 3080 (10 GB VRAM), 32 GB RAM, NVMe SSD. Isaac Sim's USD scene loading is I/O intensive — slow storage is a common performance bottleneck.
Getting Started
Isaac Sim is available through the NVIDIA Omniverse Launcher (free for research and development). The Isaac Lab framework provides pre-built RL environments and training integrations with RSL-RL, RL-Games, and Stable-Baselines3. NVIDIA's Isaac Sim documentation includes step-by-step tutorials for common robotics workflows.
For teams already using ROS 2 and Gazebo, Isaac Sim's ROS 2 bridge makes migration straightforward — existing robot URDF models can be imported via the URDF importer extension, and sensor configurations map directly to familiar ROS 2 message types.
Conclusion
NVIDIA Isaac Sim represents a significant leap in simulation fidelity for robotics teams working on perception-driven systems. Its combination of photorealistic rendering, accurate physics, native ROS 2 integration, and the Replicator SDG framework makes it uniquely suited for closing the sim-to-real gap in manipulation, mobile robotics, and autonomous inspection applications. For teams investing in learning-based control or large-scale synthetic dataset generation, Isaac Sim has become an essential part of the modern robotics development stack.