Article
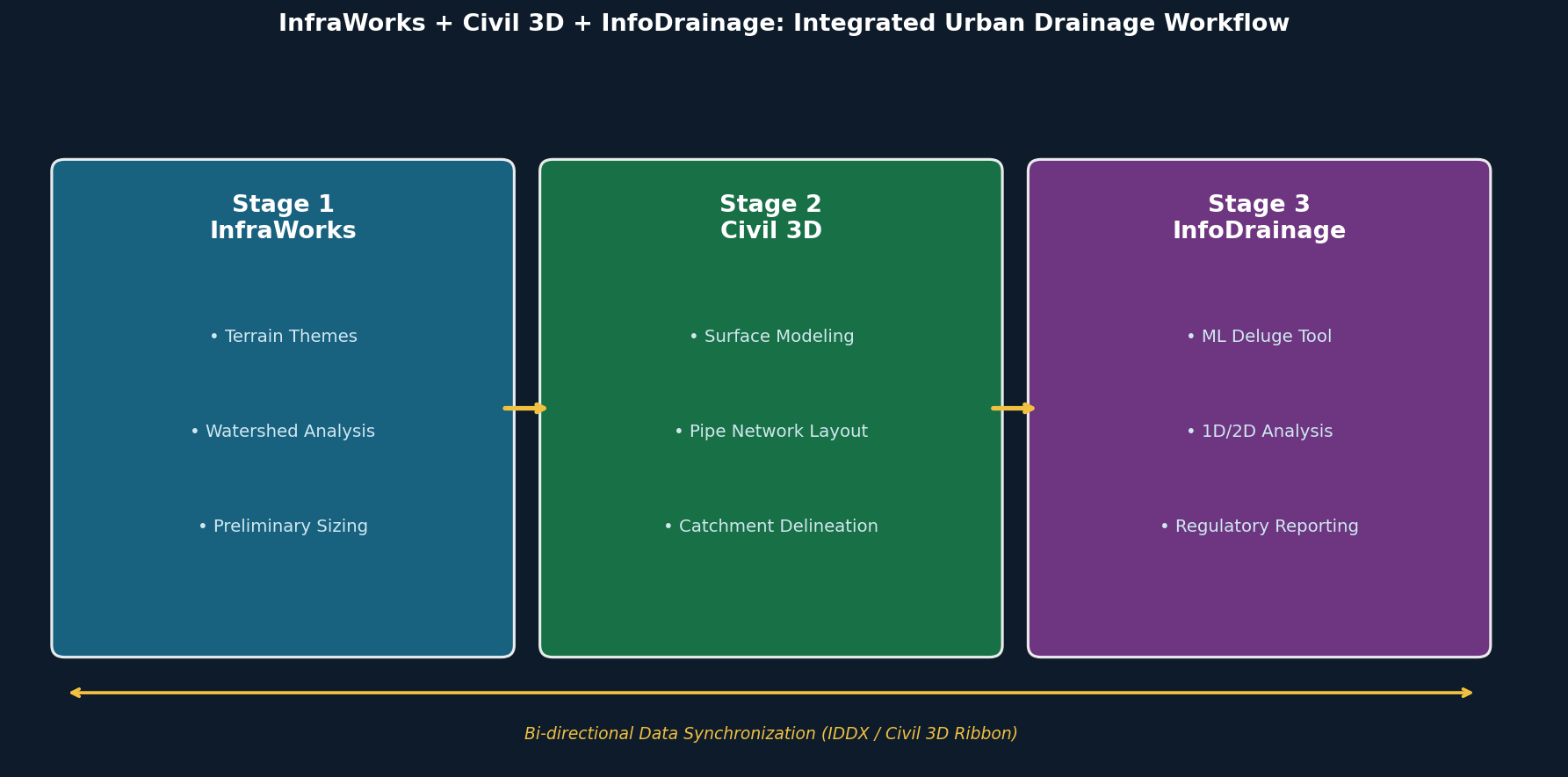
InfraWorks + Civil 3D + InfoDrainage: A Three-Stage Workflow for Urban Drainage Simulation
Autodesk's integrated InfraWorks–Civil 3D–InfoDrainage workflow creates a continuous, bi-directional data pipeline for urban stormwater design—from watershed reconnaissance and pipe network layout through coupled 1D/2D hydraulic analysis and regulatory reporting. This article walks through each stage, covering key tools, data exchange formats, and practical recommendations for infrastructure engineers.
By Jeff
147 views