OpenRocket: High-Fidelity Rocket Trajectory Simulation for Aerospace Engineers
OpenRocket is a free, open-source rocket simulation tool that has become a standard reference for aerospace engineers, defense researchers, and advanced rocketry practitioners who need accurate trajectory prediction, stability analysis, and motor optimization without the overhead of commercial simulation suites. Originally developed by Sampo Niskanen as part of his master's thesis at Helsinki University of Technology, OpenRocket has matured into a robust platform capable of modeling complex multi-stage rockets with real-world aerodynamic fidelity.
Core Simulation Architecture
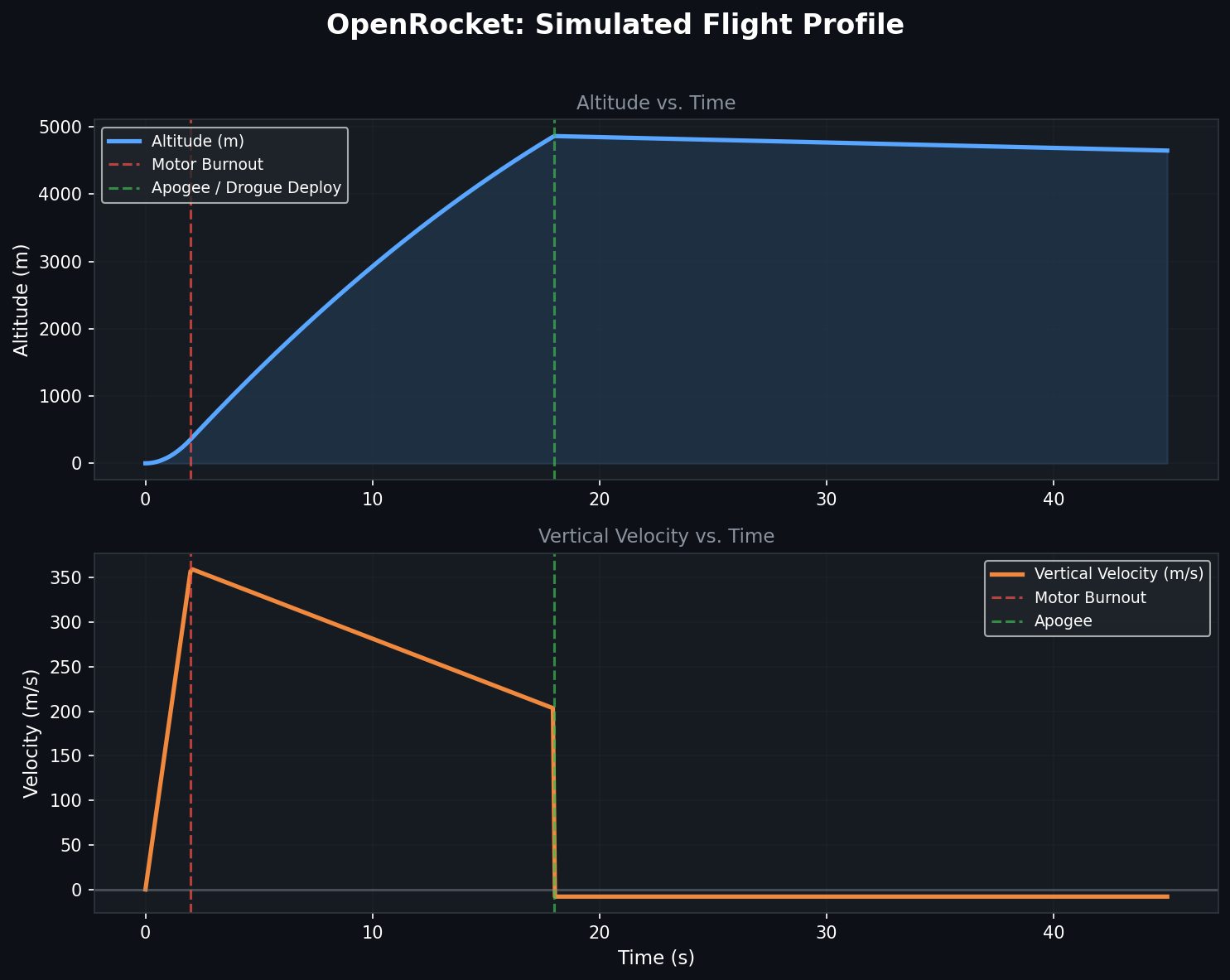
At its heart, OpenRocket solves the full 6-degree-of-freedom (6-DOF) equations of motion for a rocket in flight, integrating aerodynamic forces, thrust curves, and atmospheric conditions at each time step. The simulation engine uses a 4th-order Runge-Kutta numerical integrator with adaptive step-size control, ensuring numerical stability across the full flight envelope from launch through apogee and recovery.
The aerodynamic model is based on the Barrowman equations extended with empirical corrections for transonic and supersonic regimes. Key computed parameters include:

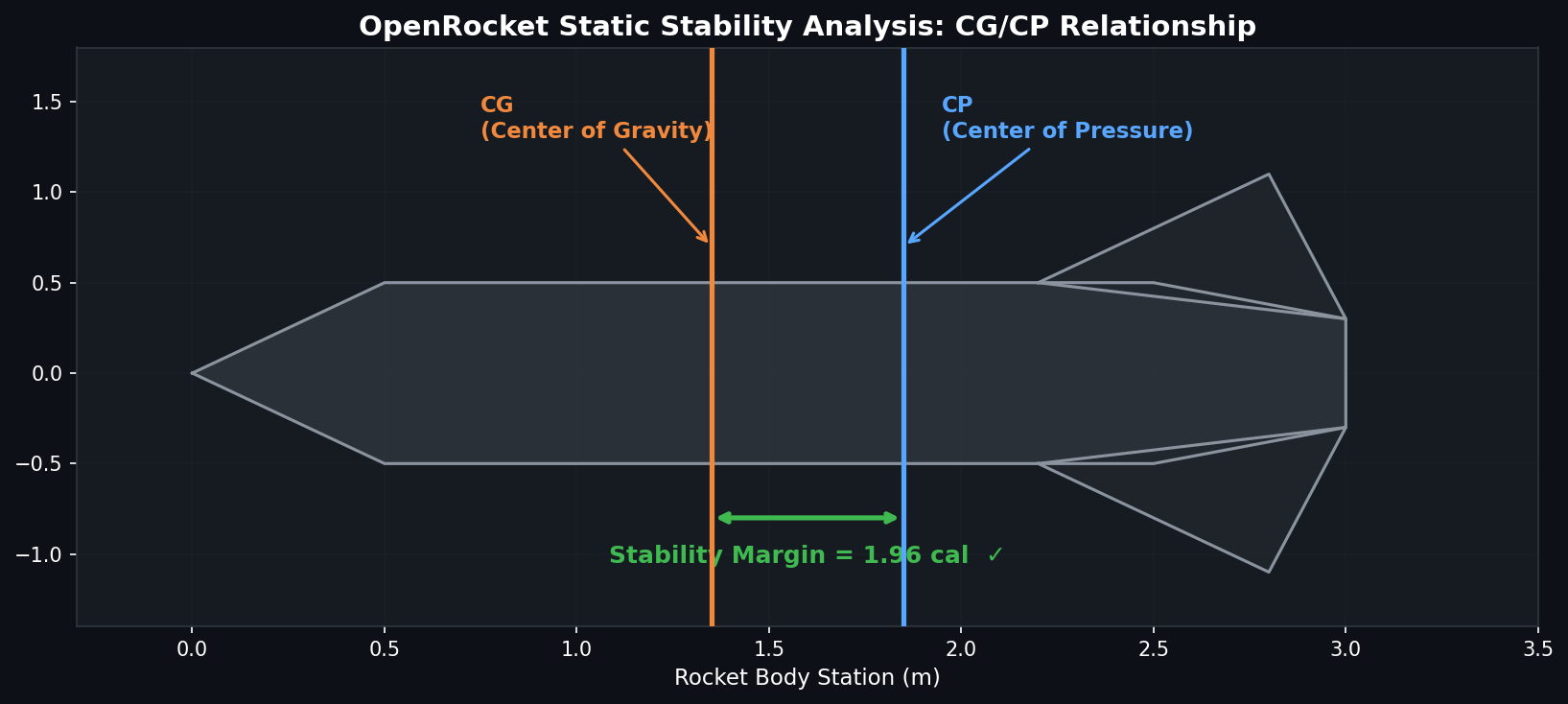
- Center of Pressure (CP): Calculated dynamically as a function of Mach number and angle of attack
- Center of Gravity (CG): Updated in real time as propellant mass is consumed
- Static Stability Margin: Expressed in calibers (CP − CG / reference diameter); OpenRocket flags designs with margins below 1.0 caliber as potentially unstable
- Normal Force Coefficient (CNα): Summed across all body components, fins, and transitions
This architecture allows engineers to rapidly iterate on fin geometry, nose cone profiles, and body tube configurations while immediately observing the impact on stability margin and apogee altitude.
Motor Selection and Thrust Curve Integration
OpenRocket integrates directly with the Thrust Curve Motor Database (thrustcurve.org), providing access to over 1,500 certified motor files in the RASP (.eng) and RockSim (.rse) formats. Engineers can:
- Filter motors by total impulse class (A through O and beyond), average thrust, and burn time
- Overlay multiple motor candidates on a single simulation run for comparative analysis
- Import custom thrust curves from static fire test data — a critical capability for defense programs developing novel propellants
For multi-stage vehicles, OpenRocket models staging events including coast phases, ignition delays, and inter-stage separation dynamics. The staging simulation correctly handles the mass discontinuity at separation and re-initializes the aerodynamic model for the sustainer configuration.
Monte Carlo Dispersion Analysis
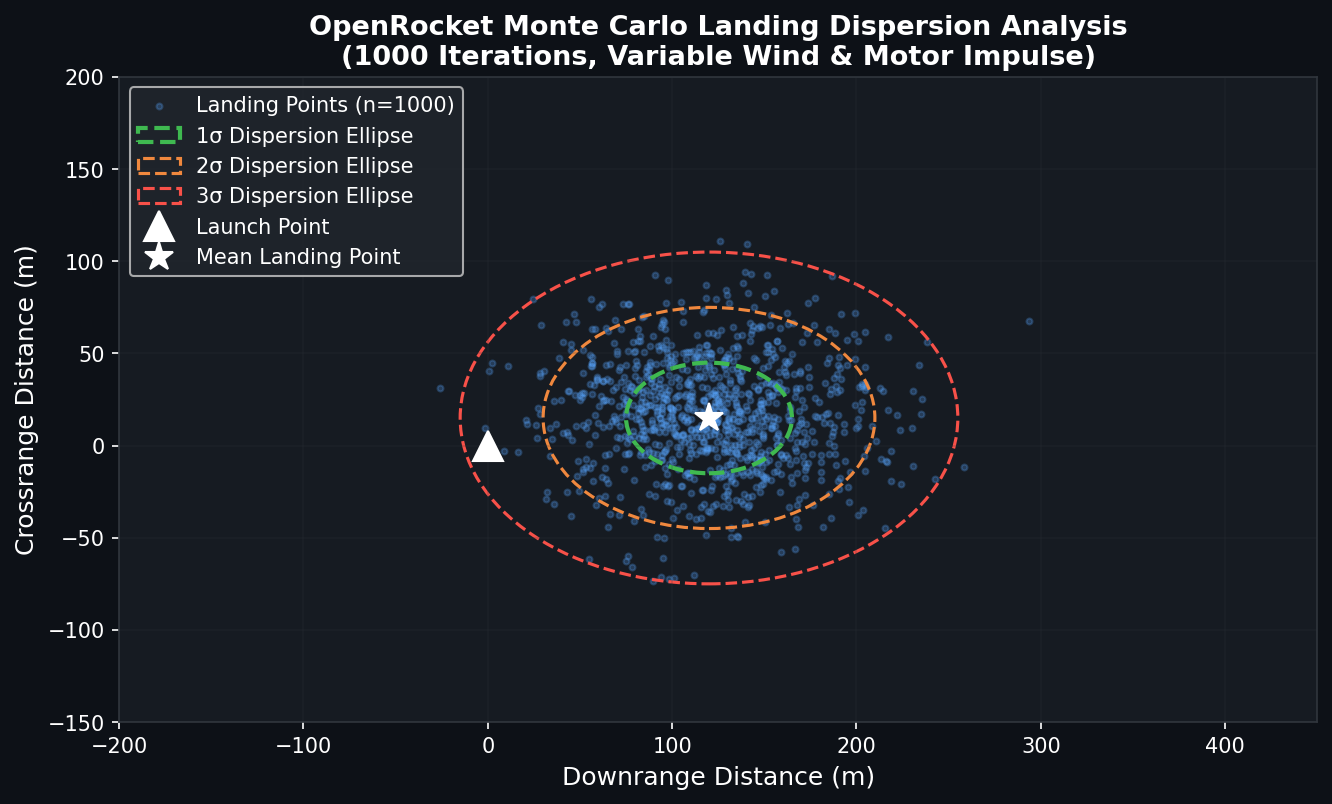
One of OpenRocket's most valuable features for defense and range safety applications is its built-in Monte Carlo simulation capability. Engineers can define probability distributions for key input parameters:
- Wind speed and direction (Gaussian or uniform distributions)
- Launch rod angle and azimuth
- Motor total impulse variation (typically ±5% for certified motors)
- Atmospheric density perturbations
Running 1,000–5,000 Monte Carlo iterations produces a landing zone dispersion ellipse that directly informs range safety planning. The output includes statistical summaries (mean apogee, standard deviation of landing distance, 3-sigma footprint) exportable as CSV for further analysis in MATLAB or Python.
# Example: Parsing OpenRocket simulation export in Python
import pandas as pd
import matplotlib.pyplot as plt
df = pd.read_csv('openrocket_sim_export.csv', comment='#')
plt.figure(figsize=(10, 6))
plt.plot(df['Time (s)'], df['Altitude (m)'], label='Altitude')
plt.plot(df['Time (s)'], df['Vertical velocity (m/s)'], label='Vertical Velocity')
plt.xlabel('Time (s)')
plt.ylabel('Value')
plt.title('OpenRocket Flight Profile')
plt.legend()
plt.grid(True)
plt.show()Scripting and Automation via the Java API
For batch simulation workflows, OpenRocket exposes a Java API that allows programmatic construction of rocket designs, simulation execution, and results extraction. This is particularly useful for design optimization loops where hundreds of geometric variants must be evaluated:
// Simplified OpenRocket API usage
Rocket rocket = new Rocket();
BodyTube tube = new BodyTube(0.5, 0.025); // length, radius in meters
rocket.getChild(0).addChild(tube);
Simulation sim = new Simulation(rocket);
sim.getOptions().setLaunchAltitude(1400); // meters ASL
sim.simulate();
FlightData data = sim.getSimulatedData();
double apogee = data.getBranch(0).getMaximum(FlightDataType.TYPE_ALTITUDE);Python users can invoke OpenRocket in headless mode via subprocess, passing .ork design files and capturing simulation output — enabling integration with SciPy optimization routines or genetic algorithm frameworks for automated fin geometry optimization.
Practical Best Practices for Defense Applications
Atmospheric Modeling: For high-altitude sounding rocket missions, replace the default ISA atmosphere with a site-specific radiosonde profile. OpenRocket accepts custom atmosphere files that define temperature, pressure, and wind as a function of altitude, significantly improving trajectory accuracy above 10 km.
Fin Flutter Analysis: OpenRocket includes a fin flutter calculator based on the NACA TN 4197 methodology. At transonic speeds, fin flutter can cause structural failure; engineers should verify that the flutter velocity exceeds the maximum expected velocity by a safety factor of at least 1.5.
Recovery System Sizing: The dual-deployment recovery simulation models drogue and main parachute deployment at user-defined altitudes. For range safety compliance, verify that the 3-sigma landing radius remains within the designated impact area under worst-case wind conditions from the Monte Carlo analysis.
Validation Against Flight Data: OpenRocket predictions typically agree with measured apogee altitude to within 5–10% for subsonic flights. For supersonic vehicles, the transonic drag model introduces larger uncertainties; cross-validation with CFD tools such as OpenFOAM or Cart3D is recommended before committing to a final design.
Integration with the Broader Simulation Ecosystem
OpenRocket complements higher-fidelity tools in a tiered simulation workflow:
| Fidelity Level | Tool | Use Case |
|---|---|---|
| Conceptual | OpenRocket | Rapid design iteration, stability screening |
| Intermediate | RASAero II | Transonic/supersonic drag refinement |
| High-Fidelity | OpenFOAM / Cart3D | Full CFD for final design validation |
| System-Level | STK / GMAT | Orbital insertion, range safety, mission planning |
This tiered approach allows engineering teams to front-load design decisions in OpenRocket's fast simulation environment before investing computational resources in higher-fidelity analyses.
Getting Started
OpenRocket is available at openrocket.info and requires Java 11 or later. The project is actively maintained on GitHub, with a community forum at rocketryforum.com providing design files, motor data, and simulation tutorials. For defense and research applications, the Thrust Curve Motor Database provides the most comprehensive source of certified and experimental motor data compatible with OpenRocket's import format.
Whether you are designing a small-scale technology demonstrator, a high-power research vehicle, or conducting range safety analysis for a test program, OpenRocket provides the analytical foundation needed to move from concept to flight with confidence.