
ROS (Robot Operating System): The Foundation of Modern Robotics and Automation
The Robot Operating System (ROS) stands as a pivotal, open-source robotics middleware suite that has fundamentally transformed the landscape of robot software development. Despite its nomenclature, ROS is not a traditional operating system but rather a comprehensive collection of software frameworks, libraries, and tools designed to simplify the creation of complex and efficient robotic systems.
Overview and Evolution
ROS provides essential services such as hardware abstraction, low-level device control, implementation of commonly used functionalities, message-passing between processes, and robust package management. This detailed exploration will delve into the core concepts, architectural components, key features, powerful simulation capabilities, diverse applications, and best practices associated with ROS.
Historical Development
The genesis of ROS can be traced back to 2007 at Willow Garage, a prominent robotics research laboratory and technology incubator. The initial objective was to establish a standardized platform for robotics development, primarily to support the PR2 robot. The first official commit of ROS code was made to SourceForge on November 7, 2007, marking the beginning of its journey.

The first major version, ROS 1, was officially released in 2009, laying the foundational groundwork for subsequent developments and rapidly gaining widespread adoption in both academic and industrial settings. A significant milestone in the evolution of ROS was the introduction of ROS 2 in 2018, designed to address the limitations inherent in ROS 1, offering substantial enhancements in performance, security, and real-time capabilities.
Core Architecture and Components
The architecture of ROS is meticulously organized into distinct levels, each serving a specific purpose in the development and operation of robotic systems.
Architectural Levels
-
Filesystem Level: This level pertains to the organization of ROS resources on the disk, including packages (the primary unit for organizing software), stacks (collections of packages), and other related files.
-
Computation Graph Level: This is the core operational level of ROS, encompassing the runtime system. It defines how processes communicate with each other through nodes, the ROS Master, Parameter Server, messages, services, topics, and bags.
-
Community Level: This level involves the collaborative aspects of ROS, including the sharing of resources, documentation, and fostering a rich ecosystem of tools and libraries among the global ROS community.
Key Components
ROS Nodes: Nodes are the fundamental building blocks of ROS, representing individual processes that perform specific computation tasks. Each node typically handles a specialized function, such as controlling sensors, processing data, or executing algorithms.
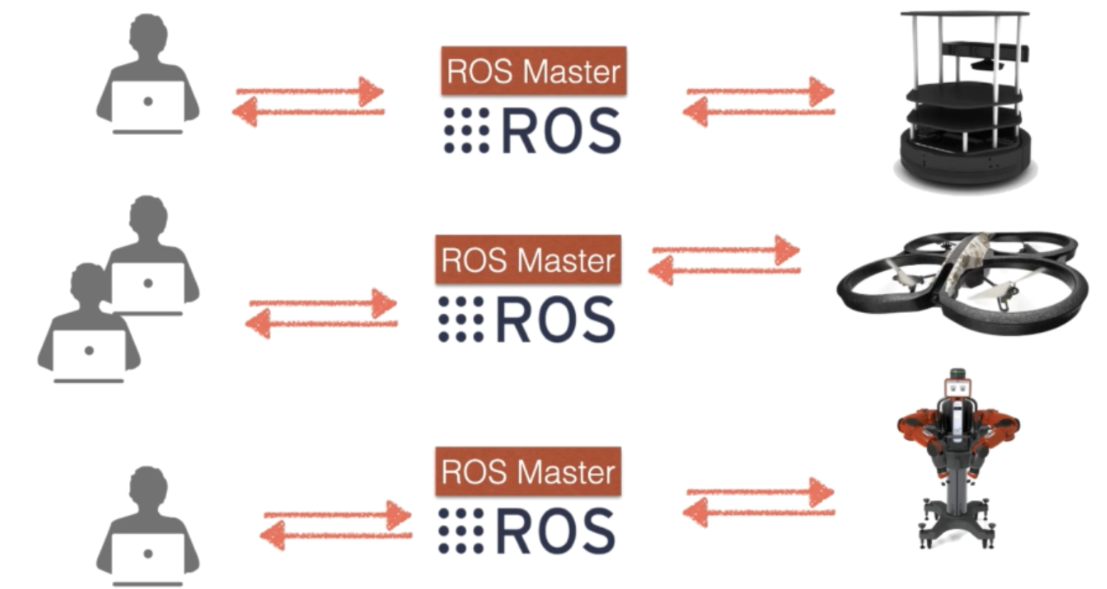
ROS Master: The ROS Master is a crucial centralized component that facilitates communication among nodes. It functions as a registry, storing registration information for topics and services, thereby enabling nodes to find each other and establish direct connections for data exchange.
Parameter Server: The Parameter Server in ROS is a shared, multi-variable dictionary that is accessible to all nodes within the ROS network. Its primary function is to store and manage global variables that nodes need to access and share.
ROS Topics: Topics are a fundamental communication mechanism in ROS, providing a named communication channel that implements a publish-subscribe messaging model. This communication is unidirectional and asynchronous, ideal for streaming data such as sensor readings.
Key Features and Capabilities
Programming Language Support
The main programming languages for writing ROS code are C++ and Python, commonly referred to as roscpp and rospy respectively:
- C++ (roscpp): Favored for its performance and efficiency, particularly suitable for real-time and computationally intensive tasks
- Python (rospy): Appreciated for its simplicity and ease of use, ideal for scripting, prototyping, and higher-level logic
Simulation and Visualization Tools
One of the most powerful aspects of ROS is its integration with sophisticated simulation and visualization tools:
Gazebo: A powerful 3D robot simulator that integrates seamlessly with ROS, providing realistic physics simulation, sensor emulation, and environment modeling capabilities.
RViz: A 3D visualization tool specifically designed for ROS applications, offering real-time visualization of robot models, sensor data, and navigation information.
Hardware Abstraction
ROS excels in streamlining the interaction between software and hardware elements through its robust hardware abstraction layer. By providing standardized interfaces for different hardware components, ROS ensures that developers can focus on higher-level functionalities without needing to delve into the specifics of hardware interfaces.
Applications Across Industries
ROS's adaptability and comprehensive toolset have led to its widespread adoption across diverse industries:
Autonomous Vehicles
ROS serves a vital function in autonomous vehicles by facilitating the integration of sensor data, perception algorithms, and control systems. It enables autonomous vehicles to fuse data from various sensors such as LIDAR, cameras, and GPS to create a comprehensive understanding of their environment.
Industrial Robotics
ROS is increasingly being adopted in industrial automation to control robotic arms, automated guided vehicles (AGVs), and other robotic systems. The ROS-Industrial project specifically extends ROS capabilities to industrial hardware and applications.
Healthcare Robotics
In healthcare, ROS is utilized to develop assistive robots, surgical robots, and rehabilitation devices. These robots can perform tasks such as patient monitoring, surgery assistance, and therapy support.
Research and Education
For educational purposes, ROS serves as a critical tool in imparting essential robotics concepts to students. Universities extensively use ROS to experiment with different robotic systems and gain practical experience through simulations and hands-on projects.
Best Practices for ROS Development
Modular Design and Node Granularity
- Single Responsibility Principle: Each ROS node should ideally be responsible for a single, well-defined task
- Clear Interfaces: Define clear and consistent message types, service definitions, and action interfaces between nodes
Effective Communication Strategies
- Choose the Right Communication Method: Understand when to use topics (for streaming data), services (for request-response interactions), and actions (for long-running, cancellable tasks with feedback)
- Minimize Data Transfer: Only publish or request necessary data to reduce network overhead and improve performance
Code Organization and Management
- Well-Structured Packages: Organize code within ROS packages using standard directories (
src,scripts,launch,msg,srv,action,cfg,urdf, etc.) - Version Control: Use version control systems (like Git) for all ROS code, including packages, launch files, and configuration files
Simulation and Testing
- Test-Driven Development: Develop and test algorithms in simulation (Gazebo, RViz) before deploying to physical hardware
- Unit and Integration Tests: Write unit tests for individual code components and integration tests for node interactions
ROS 2: The Next Generation
ROS 2 represents a significant evolution of the ROS API, specifically designed to address the limitations of ROS 1 and meet the demands of modern robotics applications:
Key Improvements
- Real-Time Performance: Support for real-time computing code leveraging the Data Distribution Service (DDS) protocol
- Enhanced Security: Improved security features to protect against cyber threats and vulnerabilities
- Better Hardware Support: Expanded support for embedded system hardware and multiple platforms
- Quality of Service (QoS): Fine-grained control over communication reliability, latency, and other parameters
Community and Resources
The strength of ROS is significantly amplified by its vibrant and supportive global community:
- Documentation and Tutorials: Extensive documentation and tutorials are available for both ROS 1 and ROS 2
- Stack Exchange: The Robotics Stack Exchange serves as a primary platform for technical questions
- ROSCon: An annual conference where developers and researchers present their work and discuss the future of ROS
- GitHub Repositories: Many open-source ROS projects and best practices collections are available
Conclusion
The Robot Operating System (ROS) has firmly established itself as an indispensable framework in the field of robotics, driving advancements in automation and enabling the creation of increasingly sophisticated, flexible, and efficient robotic systems. Its open-source nature, modular architecture, comprehensive suite of tools, and robust communication mechanisms have made it a cornerstone for developers worldwide.
From its inception at Willow Garage to the significant advancements brought by ROS 2, the platform has continuously evolved to meet the demanding requirements of modern robotics. As robotics technology continues its rapid progression, ROS is poised to remain at the forefront, shaping the future of automation and enabling the next generation of intelligent and autonomous robots.
References
- ROS Official Website (https://www.ros.org/)
- ROS Documentation (https://docs.ros.org/)
- ROS Industrial (https://rosindustrial.org/)
- Gazebo Simulation (http://gazebosim.org/)
- RViz Visualization (http://wiki.ros.org/rviz)