
JSBSim: Open-Source Flight Dynamics Modeling for High-Fidelity Aerospace Simulation
JSBSim is a mature, open-source flight dynamics model (FDM) library that has powered everything from FAA-certified flight training devices to NASA research programs and autonomous UAV development. Unlike monolithic simulation suites, JSBSim is a portable, embeddable C++ library that computes six-degree-of-freedom (6-DOF) equations of motion with high numerical fidelity — making it a go-to engine for engineers who need rigorous aerodynamic modeling without vendor lock-in.
What JSBSim Does
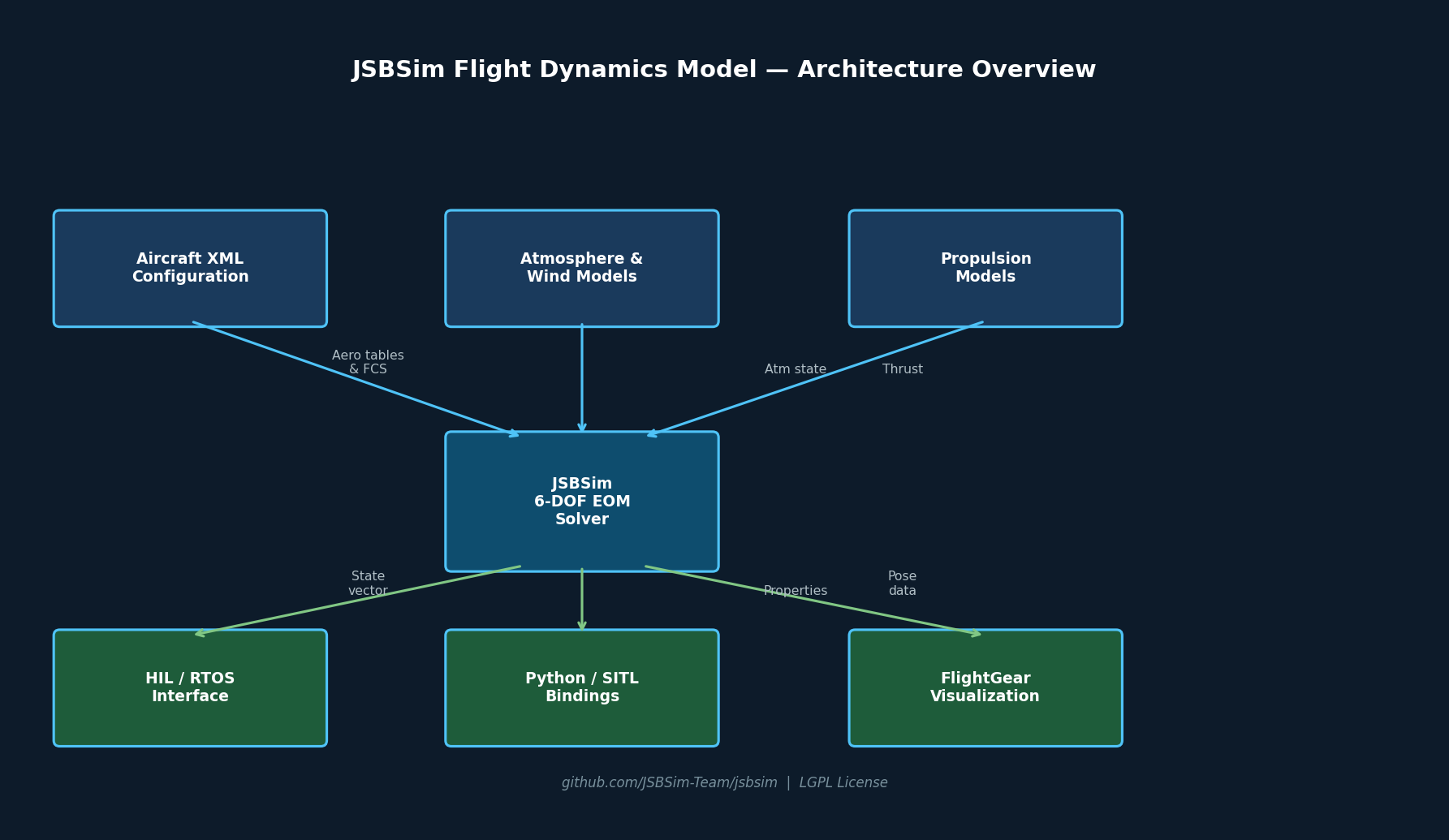
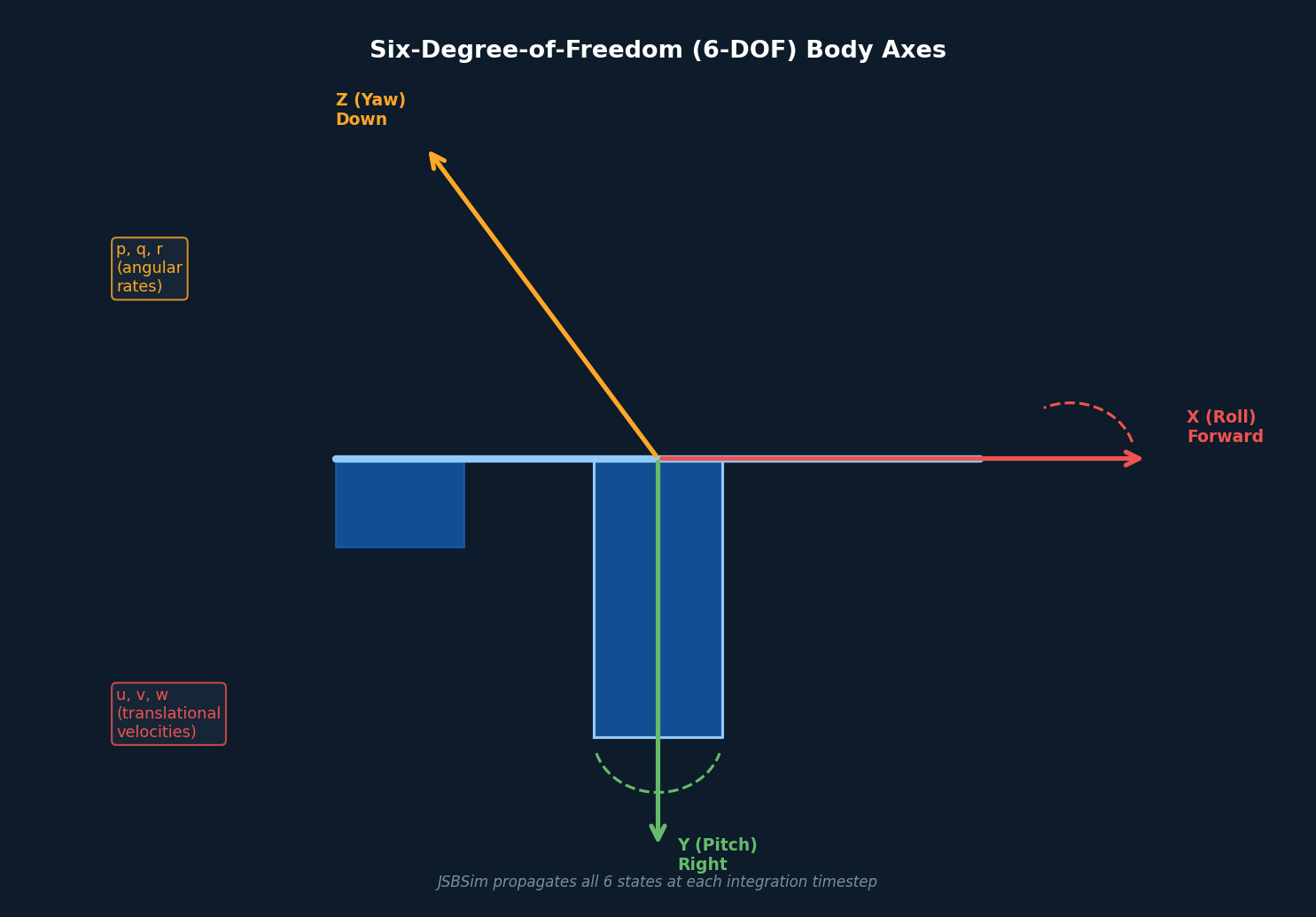
At its core, JSBSim solves the full nonlinear 6-DOF equations of motion for a rigid body in an atmosphere. It integrates:
- Aerodynamic coefficient tables (look-up tables or polynomial fits) for lift, drag, side force, and all three moment axes
- Propulsion models covering piston engines, turbojets, turbofans, rockets, and electric motors
- Atmosphere and wind models including the 1976 U.S. Standard Atmosphere, turbulence (Dryden and von Kármán spectra), and wind shear profiles
- Landing gear and ground contact with tire friction, spring-damper struts, and runway interaction
- Flight control system (FCS) blocks — PID controllers, actuator models with rate and position limits, and sensor noise injection
Aircraft configurations are defined entirely in XML files, which means a new airframe can be modeled without recompiling the library. This separation of model data from solver code is one of JSBSim's most practical strengths for defense and aerospace programs that manage multiple vehicle configurations under configuration control.

Integration Patterns in Defense and Aerospace Programs
Hardware-in-the-Loop (HIL) Testing
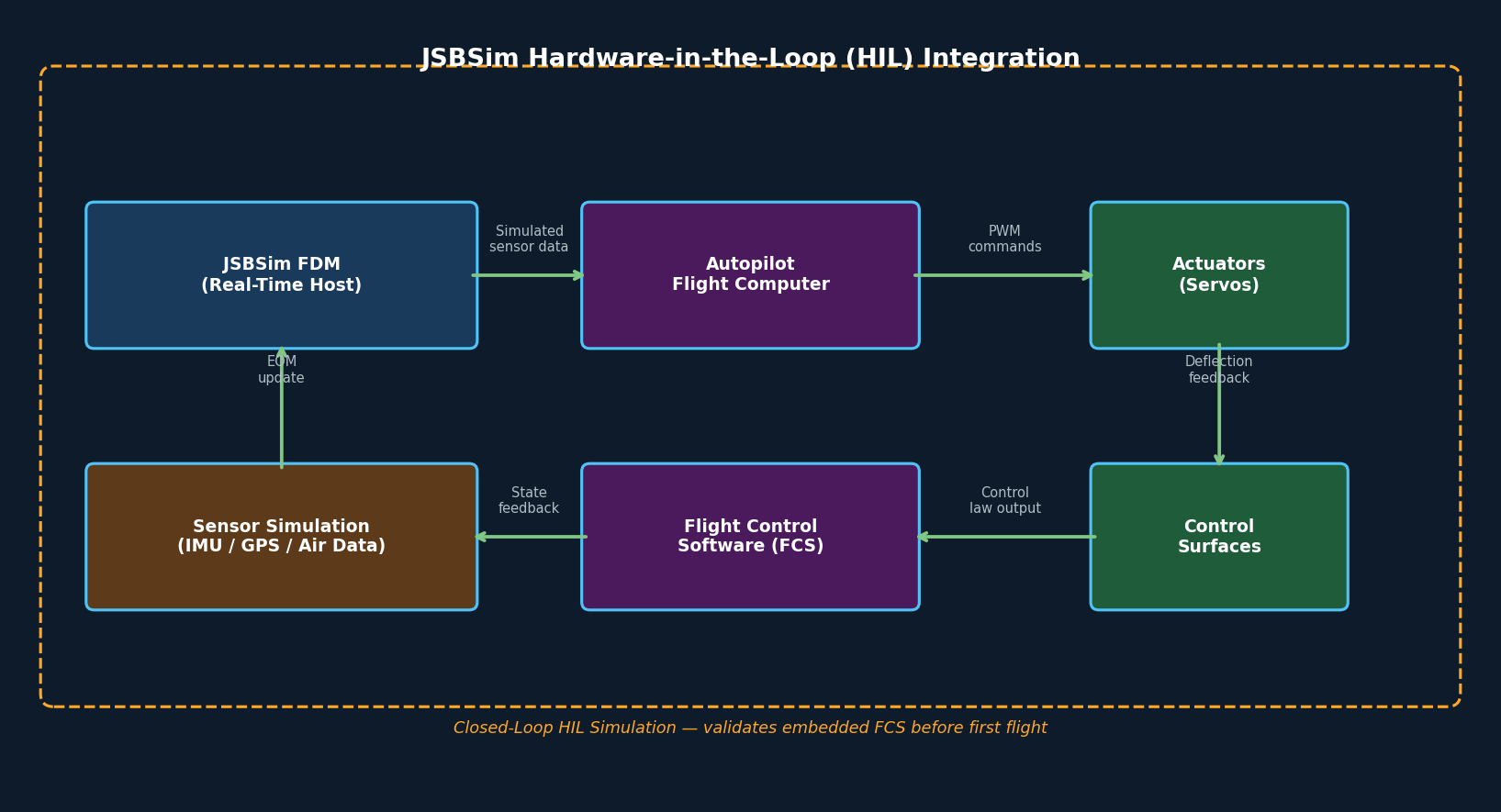
JSBSim's deterministic, real-time-capable execution makes it well-suited for HIL rigs. The library can be compiled as a shared object and called from a real-time executive (e.g., Simulink Real-Time, VxWorks, or a bare-metal RTOS). Autopilot hardware receives simulated IMU, GPS, and air data outputs; JSBSim propagates the resulting control surface deflections back into the equations of motion. This closed-loop architecture validates embedded flight software before first flight at a fraction of the cost of iron-bird testing.
Autonomous UAV Algorithm Development
JSBSim is the default FDM in ArduPilot's Software-in-the-Loop (SITL) environment and is also supported by PX4 SITL. Guidance, navigation, and control (GNC) algorithms developed in Python or ROS can be validated against a physics-accurate plant model before deployment on actual hardware. The ability to inject wind disturbances and sensor faults programmatically makes regression testing of failure-mode logic straightforward.
Monte Carlo Dispersion Analysis
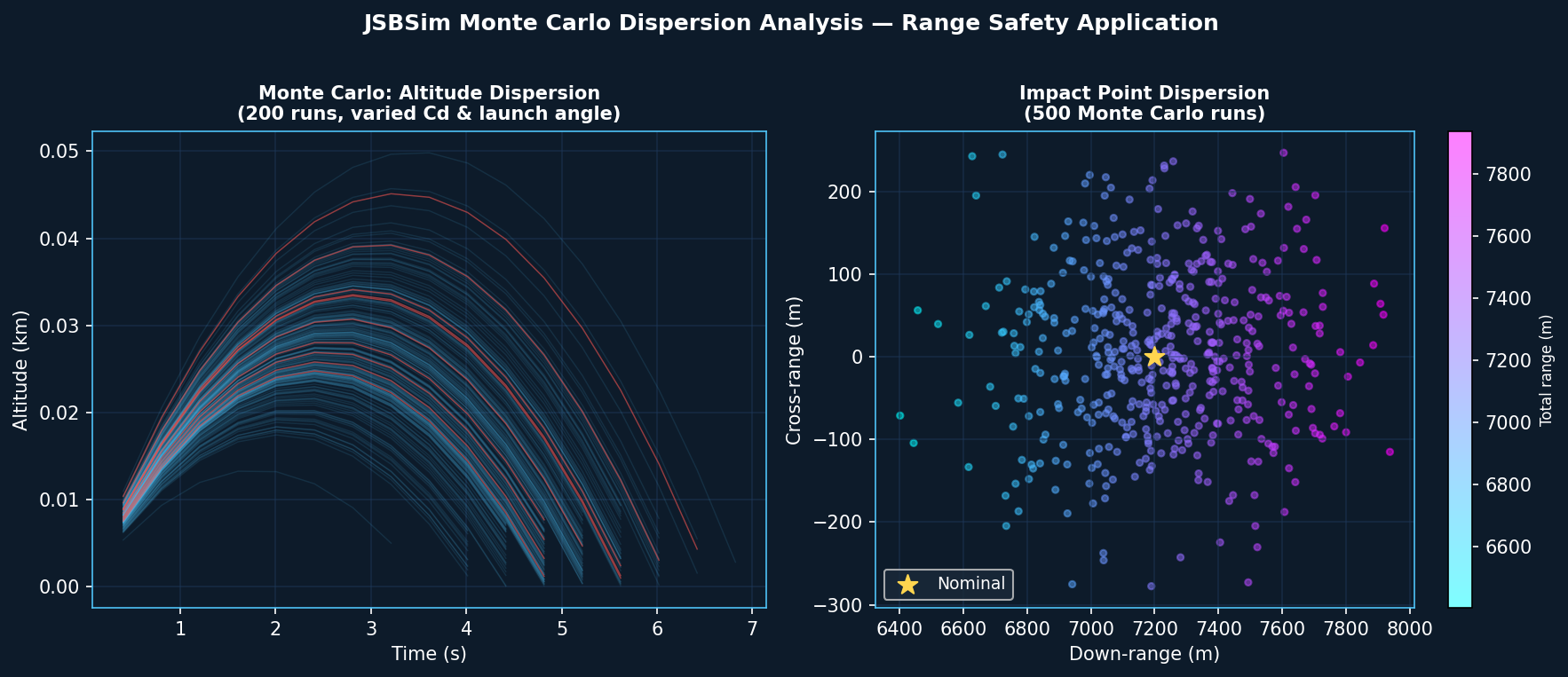
Because JSBSim runs faster than real time on modern hardware (typically 10–50× real time for a fixed-wing model), it is practical to execute thousands of simulation runs for Monte Carlo analysis. Aerodynamic coefficient uncertainties, atmospheric variability, and manufacturing tolerances can be sampled from statistical distributions to generate dispersion envelopes for range safety, miss-distance analysis, or structural load certification.
Configuring an Aerodynamic Model: Key Practices
A well-structured JSBSim aircraft XML file separates concerns into distinct sections. The aerodynamics block uses nested function elements to build up force and moment contributions from individual aerodynamic derivatives:
Best practices for aerodynamic table construction:
- Cover the full flight envelope — tables that terminate before stall or post-stall angles of attack will cause extrapolation errors during aggressive maneuvers or departure from controlled flight.
- Use consistent reference quantities — ensure wing area, mean aerodynamic chord, and span in the XML match the wind-tunnel or CFD dataset exactly.
- Validate against known trim points — run JSBSim's trim algorithm at multiple Mach/altitude combinations and compare against published performance data before integrating into a larger simulation.
- Version-control the XML files — treat aircraft configuration files as source code; tag releases that correspond to specific wind-tunnel test campaigns or CFD runs.
Interfacing JSBSim with External Tools
JSBSim exposes a well-documented C++ API and also ships a standalone executable that communicates over FlightGear's native protocol (UDP packets) or reads/writes property values via a socket interface. Common integration patterns include:
- Simulink S-Function wrapper — call JSBSim as a C-MEX S-function to embed the FDM inside a Simulink model alongside avionics, sensor, and mission-system blocks
- Python bindings — the
jsbsimPython package (available on PyPI) allows scripted batch runs, parameter sweeps, and integration with machine-learning frameworks for reinforcement-learning-based autopilot research - FlightGear visualization — pipe JSBSim state data to FlightGear for real-time 3-D visualization during piloted simulation or demonstration
Limitations and When to Look Elsewhere
JSBSim models a single rigid body. It does not natively handle:
- Flexible airframe dynamics (aeroelasticity) — for flutter analysis or structural coupling, tools like NASTRAN or ZAERO are required
- Multi-body articulation — rotorcraft with flapping hinges or tilt-rotor transition dynamics require additional modeling effort or a dedicated rotorcraft FDM
- High-fidelity CFD — JSBSim uses tabulated aerodynamic data; generating that data still requires wind-tunnel testing or CFD solvers such as OpenFOAM or SU2
For programs that need these capabilities, JSBSim can still serve as the trajectory propagator while specialized tools supply the aerodynamic or structural data it consumes.
Getting Started
JSBSim is hosted on GitHub under the LGPL license. The repository includes over 30 validated aircraft models (from the Cessna 172 to the F-16) that serve as practical starting points. The JSBSim Reference Manual provides comprehensive documentation of every XML element and property. For Python users, pip install jsbsim installs the bindings and bundled aircraft data in a single step.
For defense and aerospace programs evaluating open-source FDM options, JSBSim's combination of numerical rigor, active maintenance, and broad ecosystem integration makes it a compelling foundation for flight simulation infrastructure.