MATLAB Aerospace Blockset: Six-Degree-of-Freedom Flight Dynamics Modeling for Defense Applications
The MATLAB Aerospace Blockset is a specialized extension to Simulink that provides engineers and researchers with a comprehensive library of pre-built blocks for modeling, simulating, and analyzing aerospace vehicle dynamics. For defense and aerospace programs—from unmanned aerial vehicles (UAVs) to hypersonic glide vehicles—the Blockset's six-degree-of-freedom (6-DOF) equations of motion form the backbone of high-fidelity flight simulation workflows.
What Is the Aerospace Blockset?
Developed by MathWorks, the Aerospace Blockset extends Simulink with over 200 blocks organized into functional libraries covering:
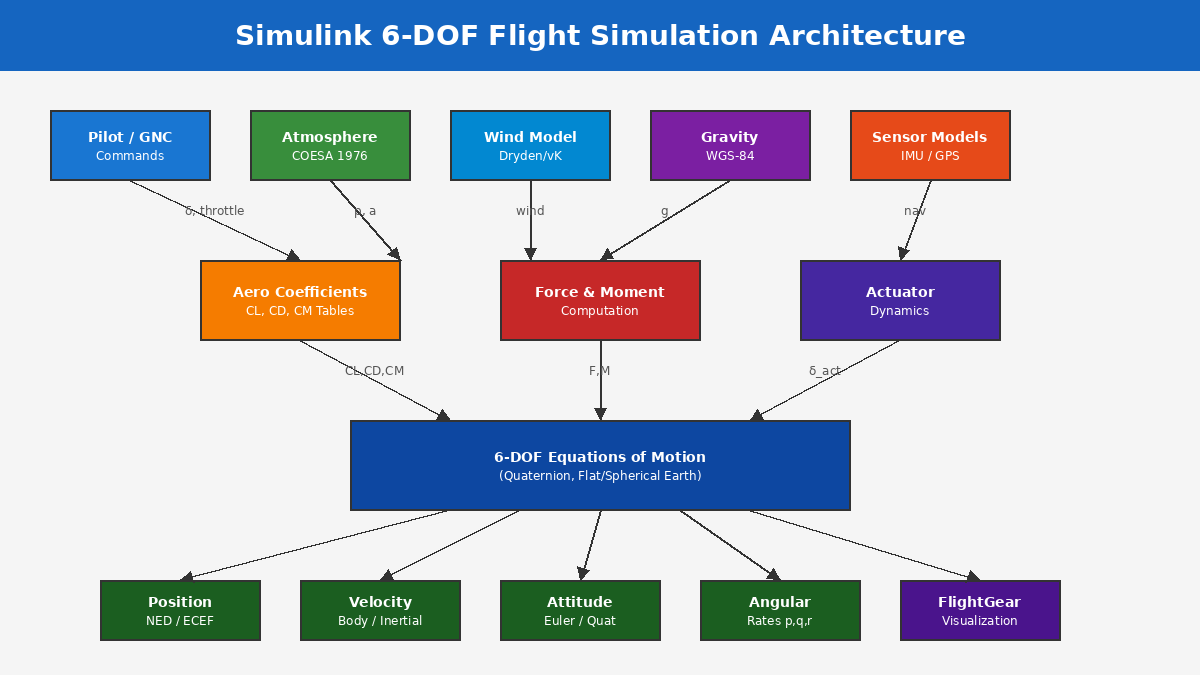
- Equations of Motion – Flat-Earth and spherical-Earth 6-DOF models using Euler angles or quaternions
- Actuator and Sensor Models – Aerodynamic control surface dynamics, IMU noise models, GPS receivers
- Environment Models – COESA atmosphere (up to 86 km), wind shear, turbulence (Dryden and von Kármán), and gravity models
- Coordinate Transformations – Body, wind, stability, NED, ECEF, and ECI frame conversions
- Visualization – FlightGear interface for real-time 3D flight visualization
This breadth makes it a go-to platform for rapid prototyping of flight control laws, guidance algorithms, and vehicle performance analysis in defense programs.

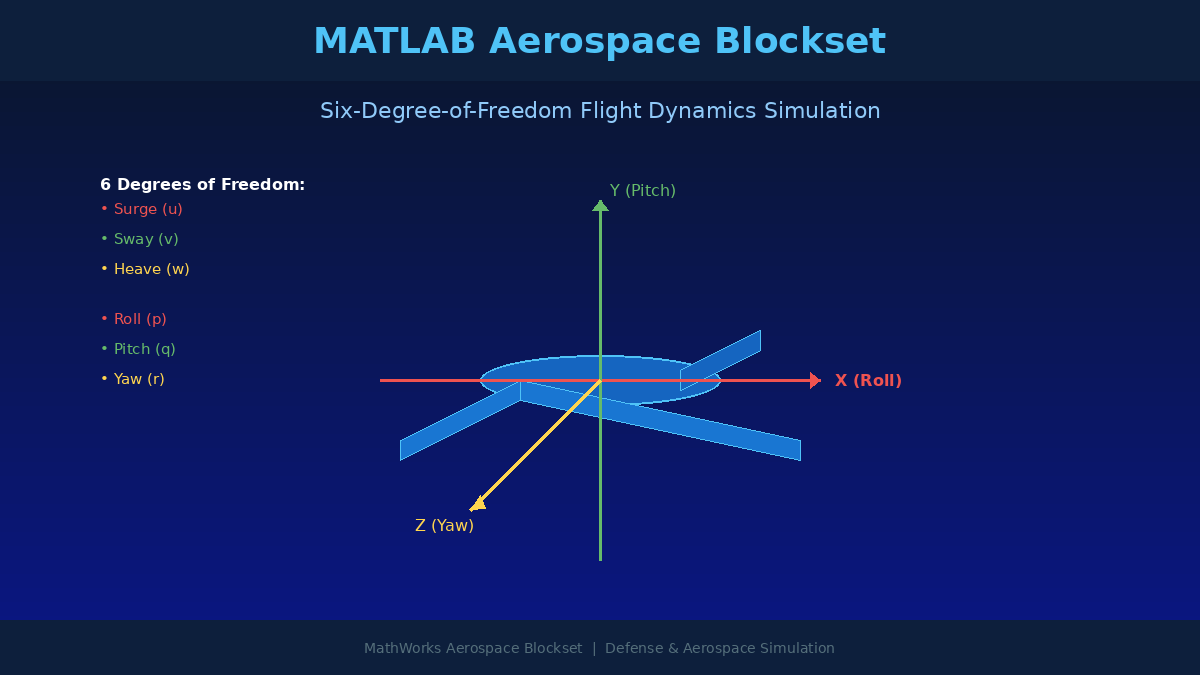
Six-Degree-of-Freedom Equations of Motion
The core of any flight simulation is the 6-DOF rigid-body model. The Aerospace Blockset provides four distinct 6-DOF block variants:
| Block | Earth Model | Attitude Representation |
|---|---|---|
| 6DOF (Euler Angles) | Flat Earth | Euler (φ, θ, ψ) |
| 6DOF (Quaternion) | Flat Earth | Quaternion |
| 6DOF ECEF (Euler) | Spherical Earth | Euler |
| 6DOF ECEF (Quaternion) | Spherical Earth | Quaternion |
For most tactical missile and UAV simulations, the flat-Earth quaternion variant is preferred. Quaternions avoid the gimbal-lock singularity inherent in Euler-angle representations—a critical consideration when simulating high-angle-of-attack maneuvers or spin-stabilized munitions.
Inputs and Outputs
Each 6-DOF block accepts:
- Forces (Fx, Fy, Fz) in the body frame (N)
- Moments (L, M, N) about the body axes (N·m)
- Initial conditions – position, velocity, attitude, angular rates
Outputs include position (NED or ECEF), velocity (body and inertial), Euler angles or quaternion, angular rates, and accelerations—all the states needed to close a guidance-navigation-control (GNC) loop.
Aerodynamic Coefficient Tables and Lookup
A realistic flight simulation requires aerodynamic data. The Aerospace Blockset integrates seamlessly with MATLAB's n-D Lookup Table blocks to implement coefficient tables as functions of Mach number, angle of attack (α), sideslip angle (β), and control surface deflections.
A typical aerodynamic model structure:
CL = CL_alpha(alpha, Mach) + CL_delta_e(delta_e, Mach)
CD = CD0(Mach) + CD_induced(CL^2 / (pi * AR * e))
CM = CM_alpha(alpha, Mach) + CM_q(q_bar, Mach) + CM_delta_e(delta_e, Mach)These tables are typically populated from wind-tunnel test data or CFD results (e.g., from Ansys Fluent or OpenFOAM), and the Blockset's interpolation handles subsonic, transonic, and supersonic regimes within a single model.
Atmosphere and Environment Modeling
The Blockset includes the COESA 1976 Standard Atmosphere block, which computes density, pressure, temperature, and speed of sound as a function of altitude. For high-altitude or hypersonic vehicles, the model extends to 86 km.
Wind disturbance modeling is equally important for control law robustness analysis:
- Dryden Wind Turbulence Model – MIL-HDBK-1797 compliant, suitable for low-altitude flight
- Von Kármán Wind Turbulence Model – More accurate spectral representation for high-altitude operations
- Wind Shear – Altitude-dependent mean wind profiles per MIL-SPEC standards
These models allow engineers to verify that autopilot designs meet stability margins under worst-case atmospheric disturbances—a mandatory step in defense system qualification.
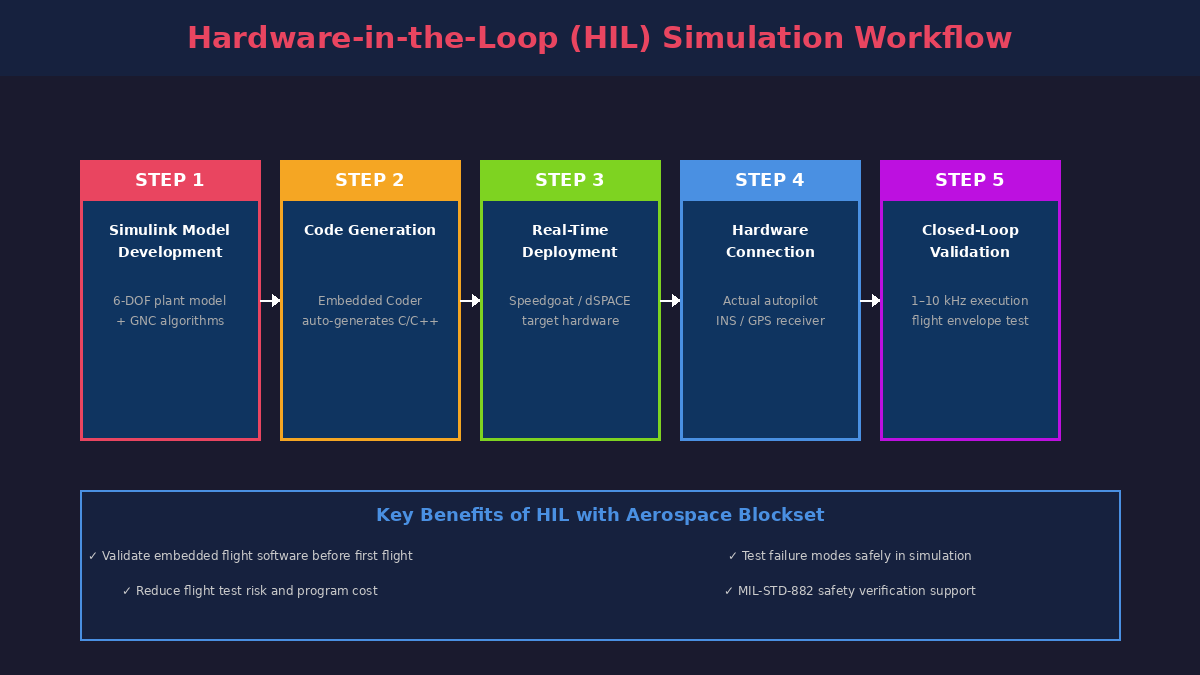
Hardware-in-the-Loop Integration
One of the most powerful workflows enabled by the Aerospace Blockset is Hardware-in-the-Loop (HIL) simulation. Using Simulink Real-Time or Embedded Coder, engineers can:
- Auto-generate C/C++ code from the Simulink flight dynamics model
- Deploy the plant model to a real-time target (e.g., Speedgoat, dSPACE)
- Connect actual flight computer hardware (autopilot, INS, GPS receiver)
- Close the loop at hardware execution rates (typically 1–10 kHz)
This workflow is widely used in defense programs to validate embedded flight software against a high-fidelity plant model before first flight, reducing risk and cost.
Best Practices for Defense Applications
Use quaternions over Euler angles for any vehicle that may exceed ±90° pitch or perform aggressive maneuvers. The computational overhead is negligible on modern hardware.
Validate atmosphere models against test data. The COESA model is accurate for standard-day conditions, but defense programs often require hot-day/cold-day dispersions. Implement these as parameter variations in a Monte Carlo framework using Simulink Design Optimization.
Separate aerodynamic data from the model. Store coefficient tables in MATLAB data files (.mat or structured arrays) and load them at model initialization. This makes it straightforward to swap aerodynamic datasets without modifying the Simulink diagram.
Leverage the FlightGear interface for pilot-in-the-loop testing. The Aerospace Blockset includes a pre-built FlightGear interface block that streams simulation state to the open-source FlightGear flight simulator for real-time 3D visualization—useful for human factors studies and operator training.
Further Resources
- MathWorks Aerospace Blockset Documentation
- MathWorks Aerospace Toolbox
- MIL-HDBK-1797: Flying Qualities of Piloted Aircraft
- FlightGear Open-Source Flight Simulator
- Dryden Wind Turbulence Model (NASA TN D-6586)
The MATLAB Aerospace Blockset remains one of the most widely deployed platforms for flight dynamics simulation in defense and aerospace programs worldwide. Its tight integration with the broader MATLAB/Simulink ecosystem—spanning control design, code generation, and verification—makes it an indispensable tool for GNC engineers working on everything from precision-guided munitions to next-generation hypersonic vehicles.