
OpenSim Musculoskeletal Modeling: Simulating Gait Analysis for Prosthetic Design Optimization
Prosthetic limb design has traditionally relied on iterative physical prototyping and clinical trials—a time-consuming and expensive process. OpenSim, an open-source biomechanical modeling platform developed at Stanford University, enables biomedical engineers to simulate human musculoskeletal dynamics with unprecedented precision, accelerating prosthetic development while reducing costs and patient burden.
Understanding OpenSim's Musculoskeletal Framework
OpenSim provides a comprehensive environment for creating subject-specific musculoskeletal models that incorporate skeletal geometry, muscle-tendon actuators, contact forces, and neural control strategies. The platform's inverse kinematics and inverse dynamics solvers allow researchers to reconstruct joint angles and muscle forces from motion capture data, providing quantitative insights into how prosthetic devices interact with residual limb biomechanics.
The software's modular architecture supports customization of muscle properties (force-length-velocity relationships), joint constraints (degrees of freedom, range limits), and external forces (ground reaction, prosthetic socket pressures). This flexibility makes OpenSim particularly valuable for prosthetic design, where device parameters must be optimized for individual patient anatomy and gait patterns.

Gait Analysis Workflow for Prosthetic Optimization
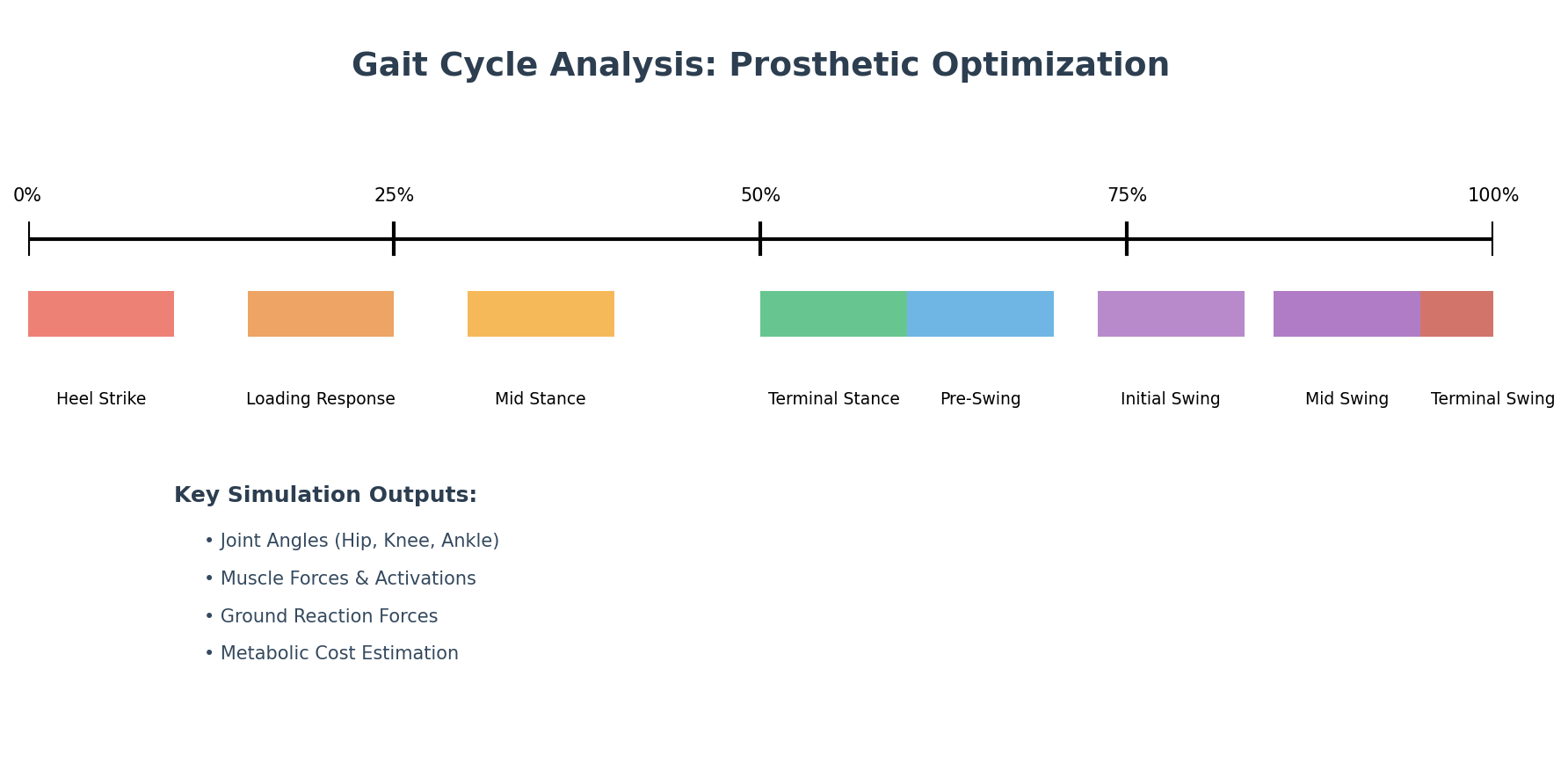
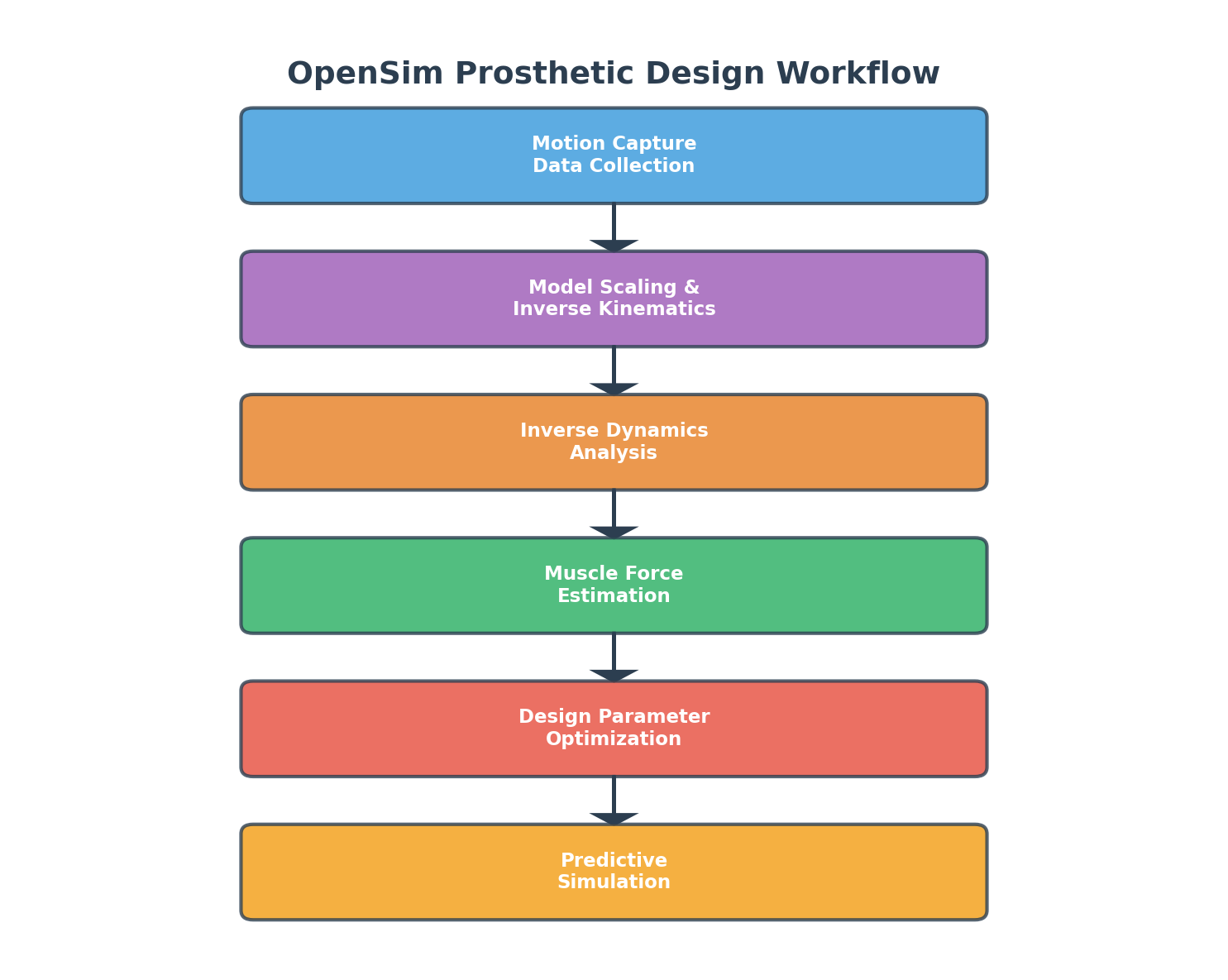
A typical OpenSim gait analysis workflow begins with motion capture data collection from patients using experimental prosthetic designs. Marker trajectories and ground reaction forces are imported into OpenSim, where the inverse kinematics tool scales a generic musculoskeletal model to match the subject's anthropometry. The scaled model then computes joint angles that best reproduce the observed marker positions throughout the gait cycle.
Next, the inverse dynamics analysis calculates net joint moments required to produce the observed motion, accounting for gravitational, inertial, and ground reaction forces. The static optimization or computed muscle control algorithms then estimate individual muscle forces that satisfy these joint moments while minimizing a physiological cost function—typically the sum of squared muscle activations.
For prosthetic design, engineers can modify socket alignment, foot stiffness, or ankle joint properties in the model and re-run the analysis to predict how these changes affect muscle loading, joint contact forces, and metabolic cost. This simulation-driven approach identifies optimal design parameters before fabricating physical prototypes.
Advanced Applications: Predictive Simulation and Design Exploration
Beyond analyzing existing gait patterns, OpenSim's forward dynamics capabilities enable predictive simulation—computing how a patient would walk with a proposed prosthetic design that hasn't been built yet. The Moco optimal control toolkit, integrated with OpenSim 4.0+, formulates gait as an optimization problem: find muscle excitation patterns that minimize metabolic energy while satisfying task constraints (walking speed, stability) and prosthetic device dynamics.
This predictive capability is transformative for prosthetic innovation. Engineers can explore unconventional designs—such as variable-stiffness ankles or powered knee actuators—and quantify their biomechanical benefits before clinical testing. Sensitivity analyses reveal which design parameters most strongly influence gait efficiency, guiding engineering priorities.
Recent studies have used OpenSim to optimize passive-elastic ankle prostheses, demonstrating that tuning spring stiffness to match biological ankle impedance reduces compensatory hip work by 15-20% compared to conventional designs. Similar approaches are being applied to exoskeleton control strategies and surgical planning for limb salvage procedures.
Integration with Clinical Workflows
OpenSim's Python and MATLAB APIs facilitate integration with clinical data pipelines. Automated scripts can batch-process gait trials from multiple patients, generating standardized reports of joint kinematics, kinetics, and muscle forces. These quantitative metrics support evidence-based prosthetic prescription and outcome assessment.
The platform's visualization tools—including 3D muscle-tendon rendering and real-time animation—enhance communication between engineers, clinicians, and patients. Seeing how a proposed prosthetic design affects muscle activation patterns helps patients understand treatment options and set realistic functional goals.
For researchers, OpenSim's extensive validation against in vivo measurements (EMG, instrumented implants) and its active user community (forums, workshops, published models) provide confidence in simulation predictions. The software is freely available at simtk.org/projects/opensim, with comprehensive documentation and tutorial datasets.
Conclusion
OpenSim transforms prosthetic design from an empirical art into a quantitative science. By simulating musculoskeletal dynamics with patient-specific models, engineers can optimize device parameters to minimize compensatory movements, reduce metabolic cost, and improve long-term outcomes. As computational power increases and model fidelity improves, simulation-driven prosthetic development will become standard practice, ultimately delivering better mobility solutions to amputees worldwide.
Further Resources:
- OpenSim Documentation: opensim.stanford.edu/support
- Moco Optimal Control Toolkit: opensim-org.github.io/opensim-moco-site
- Journal of Biomechanics OpenSim Special Issues
- SimTK Model Repository: simtk.org